





|
|||||||


|



|
|
 |
|
|
Strumenti |
 25-01-2018, 01:15
25-01-2018, 01:15
|
#1 |
|
Junior Member
Iscritto dal: Jan 2018
Messaggi: 0
|
Costruzione Drone sottomarino wi fi
Salve
Sono uno speleologo. Per una ricerca in una grotta ho esigenza di costruire un drone sottomarino senza fili a basso costo. - prima che cominciate con la solfa che il wi fi viene dissipato dall'acqua vi faccio vedere un video : https://www.youtube.com/watch?v=k-ANuy4py5g&t=313s - L'università la sapienza ha messo a punto una tecnologia basata sulla trasmissione dati via sonar. Ha una piccola banda di pochi kilobit, qualche decina diciamo, ma permette la trasmissione senza fili. - con quella banda devo per forza di cose costruire un drone, che debba ricevere solo ordini da eseguire e non posso controllare tutto da remoto con immaggini in tempo reale... quindi mi servirebbe un circuito come quello dei quadricotteri... solo un pò più complicato. per l'impermeabilizzazione dei circuiti penso di usare la tecnica dell'affogamento in gel. cioè utilizzare un gel bicomponente che immerga i circuiti e quindi non faccia arrivare l'acqua anche a grande profondità. per le eliche volevo utilizzare le pompe da acquario... sono progettate per essere immerse anche in acqua di mare... hanno i circuiti elettrici immersi e quindi possono sopportare anche grandi profondità. Mi servono consigli su come fare l'elettronica.... Arduino? e come fare una telecamera che resista a quelle profondità Datemi una mano. Ho degli sponsor ma i soldi sono pochi. C'è in ballo il record mondiale e una bellissima esplorazione speleologica. |

|

|
|
25-01-2018, 18:05
|
#2 |
|
Moderatore
Iscritto dal: Nov 2006
Messaggi: 21772
|
fammi capire bene
sei uno speleologo e da quanto capisco (visto che confondi sonar con wi-fi) con scarse competenze di elettronica e ancora meno di tlc per non parlare di controllo e vorresti costruire in "casa" un drone autonomo sottomarino a pilotaggio remoto con una banda di pochi kb, propulsione a idrogetto con pompe da aquario di potenza non definita senza nessuna idea di che sensori utilizzare per la navigazione ne idea del payload. ora non voglio essere sarcastico ma forse è meglio se cercate di droni sottomarini disponibili in commercio. inoltre, visto che comunque la navigazione sottomarina è un bel pò diversa dai droni aerei giocattolo, un cordone ombelicale molto probabilmente potrebbe essere utile (anche per il solo recupero) quindi tanto vale fornire alimentazione e comandi con quello se la portata del sistema deve essere ridotta se invece volete una portata molto ampia dove un umbelical cable è di intralcio essa cozza completamente con il discorso del basso budget
__________________
"WS" (p280,cx750m,4790k+212evo,z97pro,4x8GB ddr3 1600c11,GTX760-DC2OC,MZ-7TE500, WD20EFRX) Desktop (three hundred,650gq,3800x+nh-u14s ,x570 arous elite,2x16GB ddr4 3200c16, rx5600xt pulse P5 1TB)+NB: Lenovo p53 i7-9750H,64GB DDR4,2x1TB SSD, T1000 |
|
|
|
|
25-01-2018, 19:39
|
#3 |
|
Junior Member
Iscritto dal: Jan 2018
Messaggi: 0
|
ok Fazz! rispondo a te per poi non rispondere più a nessuno.
non hai visto il video e ti sei messo su un piedistallo a pontificare. 1 - ad oggi le tecnologie di trasmissione dei bit digitali sotto l'acqua si basano su sonar, in pratica è una trasmissione in modulazione di frequenza, frequenza degli ultrasuoni che l'acqua propaga. In collaborazione con il Team Sunrise sto cercando di costruire il drone. ( la trasmissione dati la faccio con loro in base agli accordi, è che devo portargli un drone capace di fare quelle specifiche azioni) 2 - so bene quali siano i problemi di payload ... ma elettronicamente il drone non deve eseguire azioni molto diverse dallo stabilizzare il corpo macchina in base ad eliche e valvole 3 - no, non può avere un cordone ombellicale sennò cercavo di comprare un rov e avevo fatto. Appurato che magari la prossima volta prima di dare dell'incompetente a qualcuno magari aspetta almeno un pò, diciamo che ora mi prendi per competente, e diciamo che sono laureato in ingegneria, e diciamo che sono a capo del progetto di ricerca della federazione speleologica del lazio. Vi racconto un pò di cosa si tratta. Esiste un Sink hole nel lazio ed era il più profondo del mondo fino a pochi anni fa, si chiama " Pozzo del Merro " Questo pozzo è già stato esplorato da robot, il ROV Prometeus ha esploato il pozzo fino ala profondità di -392 m, il pozzo si sviluppava in maniera verticale fino a quella quota, ma li sul fondo è stato trovato un cono detritico e delle vie laterali si aprono, sono vie geologiche inesplorate e sotto il livello del mare, quindi non hanno subito i normali processi carsici che troviamo nelle grotte, bensì si tratta di endocarsismo dovuto a secondaria attività vulcanica. Queste vie laterali potrebbero essere uno dei più grandi sistemi di questo tipo, ma non possono essere esplorate se il robot ha un cavo poichè il cavo si impiglierebbe e il robot sarebbe perso. Quella profondità è fuori portata per un sub, il record italiano, che appartiene ad uno speleologo, luca pedrali, è di 264,8 m, siamo fuori portata. Forse un palombaro potrebbe, ma i costi sono decisamente superiori. Da qui la speranza di costruire un piccolo drone con tecnologia sunrise. Visto che l'università è disposta a collaborare. Già altri droni sono stati utilizzati in mare, ma per questa grotta deve esserne cosrtuito uno appositamente, con le giuste caratteristiche di pilotaggio dovute ad una grotta. |
|
|
|
|
26-01-2018, 09:49
|
#4 |
|
Moderatore
Iscritto dal: Nov 2006
Messaggi: 21772
|
scusa ma io non pontifico ma visto che confondi wifi (ergo ieee 802.11) con un sistema sonar (wifi non è sinonimo di wireless ma è un errore che fanno le persone senza un adeguata competenza tecnica) permette di capire che le tue competenze stanno su un altro ambito (e ci mancherebbe altro) rispetto ai sistemi di comunicazione
comunque hai ragione non ho visto se non in minima parte il video (giusto il tempo per capire che è il classico video di disseminazione fatto per soddisfare gli obblighi di un progetto di ricerca europeo ), prima di parlare io ho il brutto vizio di documentarmi ed è bastato analizzare il paper relativo al testbed (Cooperation and Networking in an Underwater Network composed by Heterogeneous Assets- Jose Braga et al.) per capire che forse questo progetto è un pò borderline rispetto agli usi che ti prefiggi (speleologia) in particolare sunrise è un progetto software relativo alla costruzione di una rete di comunicazione sottomarina a bassa capacità (l'iot del 2014) basata su rete mesh il cui scopo è solo quello di fornire comandi al sistema di pilotaggio autonomo dei robot (ergo esegui questo comando, esegui quest'altro fine missione) ma che non ha ne banda ne latenza sufficiente per un pilotaggio remoto (ergo se non sai cosa ti aspetta nel sink hole che cosa ci programmi dentro al robot) secondo è una rete mesh testata in quadrato di 200m x 200m con veicoli ad una profondità massima di 4 metri in acqua libera e per fare quello hanno usato 4 sensori acustici fissi, 3 droni e una barca. ora io non sono un esperto mondiale di propagazione acustica (viceversa ne so abbastanza di propagazione em in aria) ma i rimbalzi e le riflessioni che ci sono in una tipico ambiente speleologico non sono proprio facili da gestire (harsh environment) ergo mi aspetto una portata effettiva di pochi metri per dei trasduttori di una dimensione paragonabile a quella che è possibile installare su un drone che si deve infilare in un cunicolo senza contare inoltre il fatto che tu vorresti pilotare il tutto con un microcontrollore da 16 MHz con 2 KB di ram e 1KB di storage e 31.5 KB di spazio per il programma e zero supporto per bus di comunicazione industriale ( non ha neanche una banale periferica canOpen per avere un bus di comunicazione affidabile) terzo e non ultimo la questione economica per definizione dell'architettura software la costruzione del prototipo e l'esecuzione di due test il progetto aveva un budget di oltre 5M€ con un contributo dell'eu di oltre 900K€ (con le limitazioni tecniche viste sopra) fai tu due conti. ps visto che tanto la gente pontifica senza saperne nulla (e già che c'è compra anche laurea, dottorato e ruba pure il lavoro visto che non sa nulla) chiudo pure io ti auguro che il tuo drone DIY da cunicolo non sia un buco nell'acqua ma possa portare ad una conoscenza approfondita di quel buco pieno d'acqua, mi rincresce solo aver buttato un oretta del mio tempo libero per cercare di darti una mano con un mini studio di fattibilità (negativo) TL è meglio dare contro a chi ti risponde che è un idea è infattibile senza le giuste competenze rispetto a pensare che MacGyver è solo una serie tv
__________________
"WS" (p280,cx750m,4790k+212evo,z97pro,4x8GB ddr3 1600c11,GTX760-DC2OC,MZ-7TE500, WD20EFRX) Desktop (three hundred,650gq,3800x+nh-u14s ,x570 arous elite,2x16GB ddr4 3200c16, rx5600xt pulse P5 1TB)+NB: Lenovo p53 i7-9750H,64GB DDR4,2x1TB SSD, T1000 Ultima modifica di !fazz : 26-01-2018 alle 09:53. |
|
|
|
|
26-01-2018, 15:10
|
#5 |
|
Junior Member
Iscritto dal: Jan 2018
Messaggi: 0
|
L'idea è quella di esplorare.
Il drone deve avere a bordo dei sonar per fare un rilievo degli spazi. Il protocollo di avanzamento è molto semplice, piazzare come nel ring del progetto sunrise dei sonar-fari, cioè ordinare al drone di avanzare da un Sonar-faro e eseguire un rilievo della grotta con i suoi sonar a bordo, per tornare indietro si segue il Sonar-faro. Se avanza di molto il drone deve piazzare altri sonar-fari. In pratica è come lasciare le briciole di pane sul sentiero. La propagazione delle onde in una galleria del genere potrebbe assomigliare a quello che facciamo quando iniziamo a parlare dentro un tubo e ascoltiamo dalla fine del tubo. il suono si distorce ma la tecnica dei Sonar-fari permette di trasportare i comandi. Il semplice comando che deve eseguire il drone è esplorare senza mai perdere il segnale con il Sonar-faro e farlo senza mai urtare le pareti ma immagazzinare dati sul rilievo della cavità grazie ai suoi sonar a bordo |
|
|
|
|
29-01-2018, 10:36
|
#6 |
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
Visto che abito a 10 minuti dal Pozzo del Merro e che da ragazzo (o per meglio dire "da giovane incosciente") navigavo sul laghetto con lo zatterone lasciato lì dai precedenti esploratori
puoi contattarmi anche in privato: jumpjack at libero dot it . Tornando alla "missione": * 400 metri di profondità sono 40 atmosfere, è una bella sfida, la vedo poco amatoriale; ma per fortuna io non mi occupo di batiscafi e idrodinamica, ma solo di elettronica... * il livello del laghetto si è abbassato almeno di un paio di metri quest'estate, sarà molto complicato trovare un punto sulla "riva" da usare come campo base per mandare giù il sommergibile. A meno che non fosse solo un problema di siccità e il livello non si sia rialzato. Ma non è che abbia piovuto poi tanto, anche in autunno e inverno. * mi pare di capire che quello che ti serve è un vero e proprio robot autonomo, non telecomandato, il che credo vada ben al di là delle possibilità di Arduino: servirà una mappatura 3d, e capacità decisionali non indifferenti. * giusto da qualche mese mi sto interessando di SLAM (Simultaneous Localization and Mapping) e di ricostruzioni in 3d di un ambiente a partire da semplici immagini piuttosto che da costosi LIDAR o altri sensori 3d; che ne diresti di creare il primo modello 3d del cenote più profondo del mondo? Si potrebbe articolare il progetto in 3 fasi principali: 1) mettere a punto questo sistema di mappatura 3d, limitandosi ai primi 10-20 metri sott'acqua, in modo da poter usare un comodo cordone ombelicale; in questa fase costruiremo un modello 3d dettagliato delle pareti, da studiare con comodo a casa tramite visori di realtà virtuale. Questo è il modello 3d di un cratere dell'Etna largo 100 metri, che ho creato quest'estate partendo da una cinquantina di foto fatte dal bordo del cratere. E' possibile "passeggiare virtualmente" dentro al cratere con un visore 3d, grazie a Sketchfab. Vedi anche questo thread. 2) trovare un modo per insegnare al robot di muoversi in autonomia nel modello 3d ricostruito; bisognerà farlo prima virtualmente sul modello 3d, solo dopo si proverà a implementarlo sul robot, ma comunque credo che esistano già dei programmi per farlo 3) passare all'hardware... Fammi sapere!
__________________
La scienza è provvisoria -- Jumpjack -- Ultima modifica di jumpjack : 29-01-2018 alle 10:38. |
|
|
|
|
29-01-2018, 10:43
|
#7 | |
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
Quote:
Real-Time Localization and Dense Mapping in Underwater Environments from a Monocular Sequence 3D Reconstruction of Underwater Structures Chissà però se serve un SW particolare o specifico per il subacqueo, non ho ancora letto gli articoli.
__________________
La scienza è provvisoria -- Jumpjack -- |
|
|
|
|

|
29-01-2018, 10:50
|
#8 |
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
Ore che ci penso: vista l'ampiezza limitata del cenote (7-8 metri di diametro? in dimunzione scendendo?), vale la pena tenere in considerazione la possibilità di usare una singola telecamera sferica per mapparlo, ammesso e non concesso che sott'acqua si riesca a illuminare fino a 4 metri di distanza.
Per chi non sa di cosa stiamo parlando:   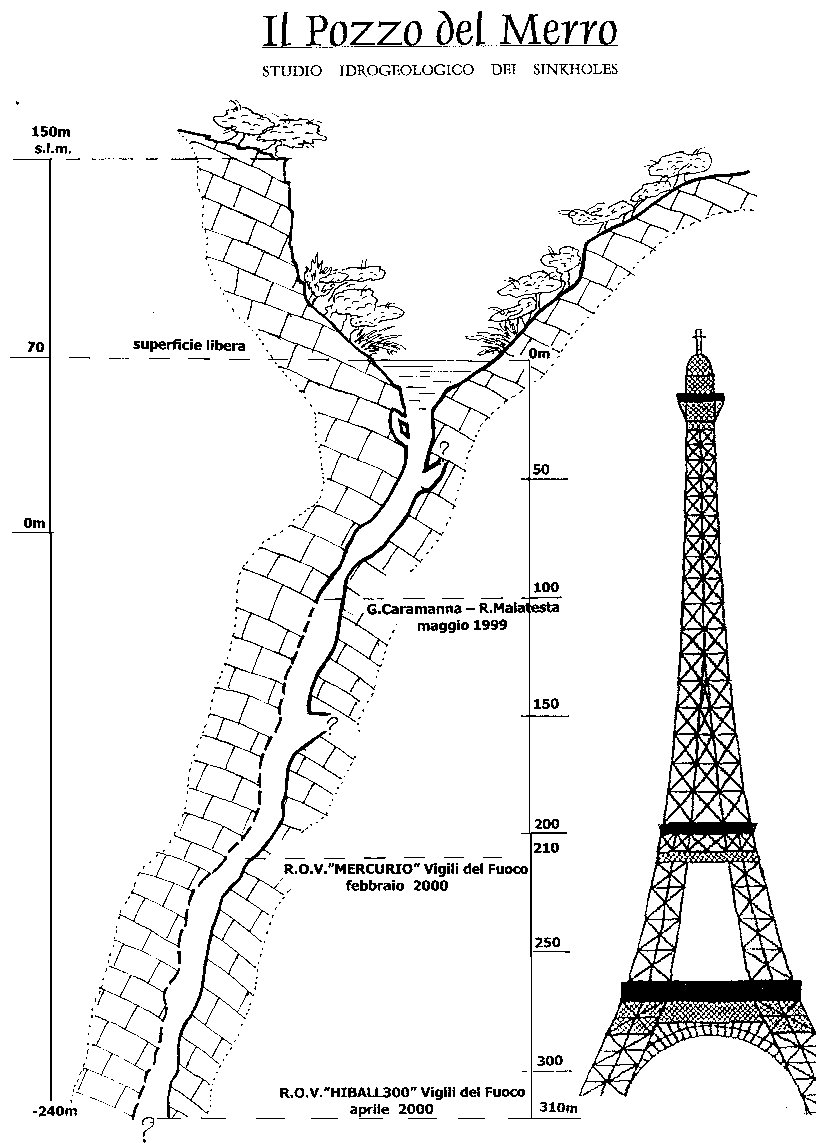 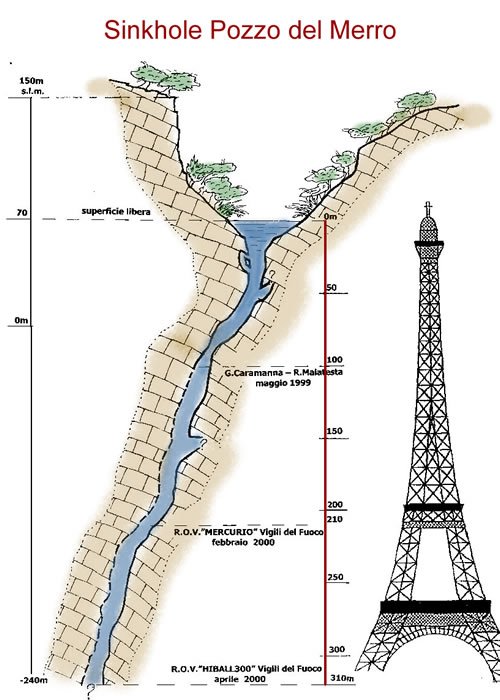 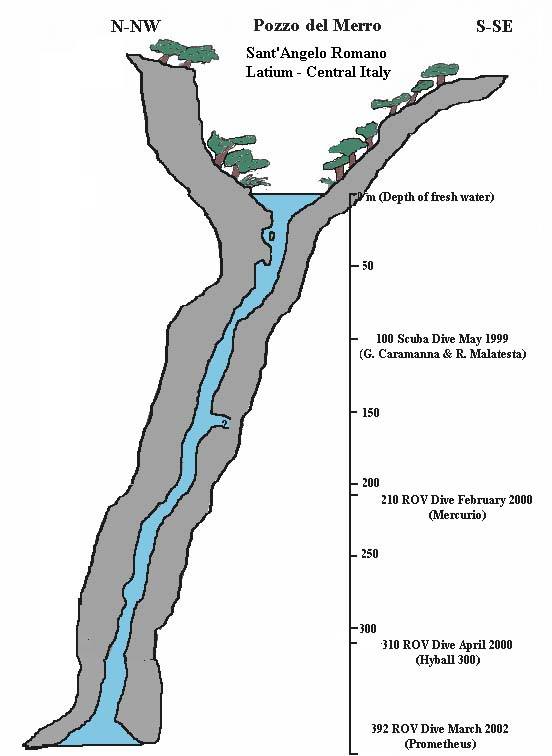
__________________
La scienza è provvisoria -- Jumpjack -- |
|
|
|
|
29-01-2018, 17:42
|
#9 |
|
Junior Member
Iscritto dal: Jan 2018
Messaggi: 0
|
Allora per l'impermeabilizzazione si pensava di usare tecnologia gel.
In pratica utilizzare gel bicomponente per riempire i vuoti del Drone dove viene installata l'elettronica, in questo modo non ci si deve preoccupare di usare costose apparecchiature che reggano 40 o 50 atmosfere di pressione. Di contro una volta fatta l'elettronica non è facilmente raggiungibile se non usando solventi per il gel. In realtà cerchiamo gente per il progetto, perchè siamo pochi, e se vuoi possiamo parlarne, ti contatto in privato. Sicuramente andremo per step. Per quanto riguarda la zattera molto probabilmente stavoltauseremo una di queste : https://www.google.it/search?tbm=isc....0.TIM1iP-L5DQ |
|
|
|
|
29-01-2018, 19:40
|
#10 | |
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
Quote:
"50 atmosfere" significa "50 tonnellate (mi correggo 50 chili) per centimetro quadrato". Anche se non me ne intendo, presumo che serva un batiscafo con pareti di acciaio spesse un paio di centimetri... A quanto vedo dalle immagini qui sopra, in precedenza sono stati usati: Fino a 210 metri: R.O.V. "Mercurio":
Fino a 310 metri: R.O.V. "Hyball"
400 metri: R.OV. "Prometeo"
Non ce la potremo mai cavare con uno scatolotto, una arduino e due motori da acquario. in ogni caso penso che dovremmo pensare a un sistema di aggancio elettromagnetico della zavorra di affondamento; così, se qualcosa va storto, quando le batterie si scaricano l'elettromagnete si spegne, la zavorra si stacca... e il ROV torna su da solo; però magari dovremo bilanciarlo, senza zavorra, a "quasi statico", per evitare che torni su come un proiettile! Ho trovato la "Compilation Pozzo del Merro"  : 30 minuti di suoni inquietanti... : 30 minuti di suoni inquietanti...https://www.discogs.com/it/Olhon-Sin...release/663902
__________________
La scienza è provvisoria -- Jumpjack -- Ultima modifica di jumpjack : 29-01-2018 alle 19:44. |
|
|
|
|
|
29-01-2018, 19:54
|
#11 |
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
E se per risparmiare facessimo un sommergibile quasi totalmente passivo? Poco più che una palla di plexiglass con dentro una telecamera sferica, un faro led e un elettromagnete, il tutto lasciato cadere giù "a babbo morto".
A giudicare dalle rudimentali mappe disponibili, le pareti sono quasi verticali per 400 metri, quindi sarebbe come buttare un pallone da basket giù da una scogliera... Si potrebbe provare a calcolare teoricamente il tempo che ci metterebbe ad arrivare in fondo, e far sganciare la zavorra tramite un timer. Se la palla si ferma da qualche parte pazienza, quando finiscono le batterie torna su da sola. Il sistema di ricostruzione 3d tramite telecamera non ha bisogno di un orientamento stabile delle immagini, ci pensa il SW a raddrizzarle. L'incognita è come/dove trovare/fabbricare la palla di plexiglass.
__________________
La scienza è provvisoria -- Jumpjack -- |
|
|
|
|
29-01-2018, 19:58
|
#12 |
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
Pubblicazioni utili:
Under High Pressure: Spherical Glass Flotation and Instrument Housings in Deep Ocean Research Pressure Distribution in a Fluid
__________________
La scienza è provvisoria -- Jumpjack -- |
|
|
|
|
29-01-2018, 20:59
|
#13 | ||
|
Senior Member
Iscritto dal: Aug 2004
Città: 7°38E 45°07N
Messaggi: 2300
|
Quote:
Quote:
... guarda che vuole esplorare "oltre" il verticale 
|
||
|
|
|
|
29-01-2018, 21:58
|
#14 |
|
Junior Member
Iscritto dal: Jan 2018
Messaggi: 0
|
se tu immetti in un liquido una bottiglia vuota e poi la porti fino a 500 metri la pressione la schiaccia. ma pensi che la schiacci già a 50 metri per altro.
se invece la bottiglia è piena puoi portarla anche a 500 metri. la bottiglia non si schiaccia, il drone con il gel segue lo stesso principio. il punto è verificare che anche l'elettronica mantenga funzionalità a 50 atm. A questa domanda non so rispondere e non so dire se siano mai stati fatti dei test sulla pressione sui circuiti integrati. Per quanto riguarda l'elettronica, ok niente arduino. Cosa proporresti per fare un rilievo 3d della grotta ? per pilotarlo tra l'altro bastano ed avanzano delle pompe per acquario, poichè il meccanismo che ne controlla la quota è un meccanismo da sottomarini. una cosa semplice in realtà. prendi una bombola ad altre prestazioni di gas, come quelle per il co2 degli acquari per intenderci, quella conterrà aria però, basta un compressorino ad alta pressione per caricarla. ( la carichi anche fino a 100 atm ) A quel punto serve solo un sistema di valvole ed una camera di espansione. nella camera di espansione fai entrare l'acqua con le valvole ( di tipo magnetico ad alta pressione, sono commerciai e non costano molto ) e quando vuoi uscire apri la valvola collegata alla bombola dell'aria e immetti aria nella camera di espansione, l'aria fa uscire l'acqua e la spinta derivante porta su il drone. é un sistema semplice e si basa su valvole e cose commercialmente reperibili, la stessa camera può essere fatta con una bombola più grande. |
|
|
|
|
29-01-2018, 22:03
|
#15 |
|
Junior Member
Iscritto dal: Jan 2018
Messaggi: 0
|
per farti capire, valvole come questa
niente link a negozi online, grazie funzionano anche in corrente continua fino a 90 atm, cioè 900 m, quindi ci consentono una quota di lavoro adeguata Ultima modifica di Ziosilvio : 30-01-2018 alle 19:44. Motivo: niente link a negozi online, grazie |
|
|
|
|
29-01-2018, 23:22
|
#16 |
|
Senior Member
Iscritto dal: Jul 2009
Messaggi: 1161
|
domanda banale, ma esistono soluzioni lowcost per questo tipo di batiscafi in oceano aperto?
perchè se non ci son soluzioni dove i problemi son molti di meno.. dubito si possa trovare qualcosa di low cost in un contesto molto più complesso.
__________________
Web2.0 Guides And Tutorials SLR: Canon 6D ZOOM: Canon EF 24-105mm f/4L IS USM FISSI: - Canon EF 28mm f/1.8 USM - Canon EF 40mm f/2.8 STM - Canon EF 50mm f/1.4 USM - Canon EF 100mm f/2 USM - Canon EF 200mm f/2.8L USM II ALTRO: Canon 430 EX II |
|
|
|
|
30-01-2018, 09:11
|
#17 | ||
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
Quote:
, poi si vedrà... Quote:
Come dicevo, per il rilievo 3d bastano delle foto. TANTE foto. MIGLIAIA di foto. Poi esistono SW appositi che fanno tutto in automatico come 3DF Zephyr e simili (anche gratuiti). Ho letto che tecnicamente è possibile effettuare la ricostruzione 3d a partire da singole immagini sferiche, ma non so se c'è già un SW disponibile (3d zephyr non lo fa) o se era un SW sviluppato in proprio dai ricercatori. Comunque non riesco a immaginare attuatori economici che funzionino a 50 atmosfere. Al massimo si potrebbe mettere all'esterno un singolo motore resistente alle alte profondità, e per orientare lo scafo usare invece dei contrappesi interni che si muovono di qua e di là (ma non si può fare se tutto è immerso nel gel...). Se funziona per far camminare BB8 Per evitare punti di passaggio tra interno ed esterno, che sarebbero punti deboli, si può poi pensare a una ricarica wireless. Comunque fossi in te contatterei il gruppo dei vigili del fuoco che ha effettuato le tre immersioni precedenti.
__________________
La scienza è provvisoria -- Jumpjack -- |
||
|
|
|
|
30-01-2018, 09:15
|
#18 |
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
Chissà quanto costano queste "palle"...
   niente link a negozi online, grazie Ne fanno anche di adatte a 12000 metri di profondità...
__________________
La scienza è provvisoria -- Jumpjack -- Ultima modifica di Ziosilvio : 30-01-2018 alle 19:45. Motivo: niente link a negozi online, grazie |
|
|
|
|
30-01-2018, 09:53
|
#19 | |
|
Senior Member
Iscritto dal: Sep 2004
Messaggi: 1262
|
Quote:
 Ho visto adesso l'immagine... Penso che io seguirò le operazioni da casa...
__________________
La scienza è provvisoria -- Jumpjack -- |
|
|
|
|
|
30-01-2018, 15:30
|
#20 |
|
Junior Member
Iscritto dal: Jan 2018
Messaggi: 0
|
gia contattati
e stiamo lavorando anche con loro a tutto il progetto. |
|
|
|
|
|
| Strumenti | |


|
|

Tutti gli orari sono GMT +1. Ora sono le: 16:48.















